惯性主力矩与惯性张量的区别
在刚体力学和动力学中,理解物体的旋转运动特性是至关重要的。其中,惯性主力矩和惯性张量是两个核心概念,它们各自描述了物体在不同情境下的转动惯性和空间分布特性。以下是两者的详细对比:
一、定义及基本性质
惯性主力矩(Moment of Inertia, 也称为转动惯量)
- 定义:是描述一个物体绕某轴旋转时,其惯性大小的物理量。它反映了物体对旋转运动的阻碍程度。
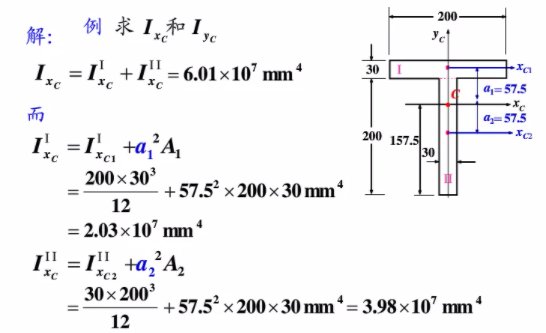
- 公式:对于一个质量为m的质点,距旋转轴的距离为r,其惯性主力矩I可以表示为 (I = mr^2)。对于连续分布的物体,则需要对整个物体进行积分计算。
- 特点:惯性主力矩是一个标量值,但在考虑具体旋转轴时会表现出方向性(通过正负号表示)。
惯性张量(Inertia Tensor)
- 定义:是描述一个物体在空间任意方向上旋转时的惯性特性的张量。它是二阶对称张量,包含了关于物体质量分布的所有必要信息。
- 公式:对于一个具有质量密度ρ的物体,其在笛卡尔坐标系中的惯性张量分量 (I_{ij}) 可以表示为 (\int (x_i x_j) \rho(x_1, x_2, x_3) , dx_1 , dx_2 , dx_3) ,其中 (x_i) 和 (x_j) 是坐标系的三个方向。
- 特点:惯性张量是一个矩阵,包含9个分量(在三维空间中),这些分量之间满足一定的对称性关系(即 (I_{ij} = I_{ji}))。
二、应用场景及作用
惯性主力矩的应用
- 主要用于描述物体绕某一特定轴的旋转运动,如陀螺仪的稳定性分析、飞轮的能量存储等。
- 在设计机械系统时,通过调整物体的质量和形状来改变其惯性主力矩,从而优化系统的动态性能。
惯性张量的应用
- 用于描述物体在空间任意方向上的旋转运动,特别是在处理复杂的三维旋转问题时(如航天器的姿态控制、机器人的关节运动等)。
- 在计算机图形学、机器人学以及航空航天等领域中,惯性张量是进行精确模拟和控制的重要工具。
三、总结
- 惯性主力矩是描述物体绕某一特定轴旋转时的惯性大小的物理量,它是一个标量值但具有方向性(相对于旋转轴)。
- 惯性张量则是描述物体在空间任意方向上旋转时的惯性特性的张量,它是一个包含9个分量的矩阵,能够全面反映物体的质量分布和旋转特性。
在实际应用中,选择使用哪个概念取决于具体的物理问题和研究对象。对于简单的旋转问题,惯性主力矩通常足够;而对于复杂的空间旋转问题,则需要引入惯性张量来进行更精确的描述和分析。